ربات ASIMO (Advanced Step in Innovative Mobility)، ساخته شرکت هوندا، از برجستهترین رباتهای انساننما در تاریخ رباتیک است. این ربات که در سال 2000 معرفی شد، با تواناییهای پیشرفته در حرکت، تعامل اجتماعی و فناوریهای هوشمند، استانداردهای جدیدی در توسعه رباتهای انساننما ایجاد کرد. اگرچه هوندا در سال 2018 توسعه ربات ASIMO را متوقف کرد، فناوریهای آن همچنان در پروژههای جدید و محصولات هوندا تأثیرگذار هستند.
آشنایی با ربات انساننمای ASIMO
ربات آسیمو رباتی انساننما است که توسط هوندا برای شبیهسازی حرکات و تعاملات انسانی طراحی شد. این ربات با ارتفاع 1.3 متر و وزن 48 کیلوگرم، به اندازه یک کودک 8 تا 10 ساله است. ASIMO برای اولین بار در 20 نوامبر 2000 معرفی شد و تا سال 2022 در نمایشها و تحقیقات حضور داشت. این ربات با 34 درجه آزادی (degrees of freedom) و تواناییهایی مانند راهرفتن، دویدن، بالا رفتن از پلهها و تعامل با انسانها، نمادی از پیشرفت هوندا در رباتیک بود. ASIMO در چهار نسخه اصلی (2000، 2002، 2005 و 2011) توسعه یافت و بیش از 100 واحد از آن ساخته شد. در مارس 2022، هوندا اعلام کرد که ASIMO بازنشسته شده و تمرکز خود را بر فناوریهای عملیتر مانند رباتهای آواتار معطوف کرده است.

هدف از توسعه ASIMO توسط هوندا
هوندا توسعه ربات آسیمو را در سال 1986 با هدف ایجاد رباتی آغاز کرد که بتواند در محیطهای انسانی فعالیت کند و به افراد در زندگی روزمره کمک کند. این شرکت به دنبال ساخت رباتی بود که نهتنها راه برود، بلکه بتواند با انسانها تعامل کرده و وظایفی مانند کمک به افراد معلول یا سالمند را انجام دهد. ASIMO همچنین بهعنوان پلتفرمی برای آزمایش فناوریهای پیشرفته هوندا، مانند کنترل تعادل و تشخیص محیط، طراحی شد. هوندا قصد داشت با ASIMO، رباتیک را به ابزاری برای بهبود کیفیت زندگی تبدیل کند و در عین حال برند خود را بهعنوان پیشرو در فناوری معرفی کند. این پروژه همچنین به الهامبخشی به نسلهای جوان برای دنبال کردن علوم و مهندسی کمک کرد.
نحوه شارژ و مصرف انرژی
ASIMO از یک باتری لیتیوم-یون 51.8 ولتی تغذیه میشد که در نسخه 2005 جایگزین باتری نیکل-فلز هیدرید شد و زمان عملکرد را به حدود یک ساعت افزایش داد. شارژ باتری از طریق یک ایستگاه شارژ اختصاصی انجام میشد و حدود 3 ساعت طول میکشید. مصرف انرژی ربات آسیمو به دلیل حرکات پیچیده و پردازش مداوم دادههای حسگرها بالا بود، بهویژه در فعالیتهایی مانند دویدن یا تعاملات چندوظیفهای. هوندا تلاش کرد با بهینهسازی مدیریت انرژی و کاهش وزن ربات، کارایی را بهبود بخشد، اما محدودیتهای باتری یکی از چالشهای اصلی برای استفاده طولانیمدت بود.
مقایسه ربات آسیمو با رباتهای Boston Dynamics
ASIMO و رباتهای Boston Dynamics، مانند ربات اسپات و Atlas، رویکردهای متفاوتی به رباتیک دارند. ASIMO برای تعاملات انسانی و نمایش فناوری طراحی شده بود و حرکات آن (مانند راهرفتن با سرعت 2.7 کیلومتر بر ساعت و دویدن با 7 کیلومتر بر ساعت) روان و انسانمانند بودند. در مقابل، Atlas با تواناییهای پیشرفتهتر (مانند پرش، پشتک زدن و دویدن با سرعت 9 کیلومتر بر ساعت) برای وظایف سنگین و پویا طراحی شده است.
Spot، یک ربات چهارپا، برای بازرسی صنعتی و محیطهای ناهموار مناسب است و از یادگیری ماشین برای ناوبری خودکار استفاده میکند، در حالی که ASIMO فاقد این قابلیت بود. ASIMO در تعامل اجتماعی (تشخیص چهره و صوت) قویتر بود، اما Boston Dynamics در استحکام و کاربردهای عملی پیشرو است. مصرف انرژی ASIMO (1 ساعت عملکرد) در مقایسه با Spot (تا 90 دقیقه) محدودتر بود. در نهایت، ASIMO یک ربات نمایشی بود، در حالی که رباتهای Boston Dynamics به سمت تجاریسازی حرکت کردهاند.
قابلیتهای حرکتی و راهرفتن
ربات ASIMO به دلیل تواناییهای حرکتی پیشرفتهاش شناخته میشود. این ربات میتواند با سرعت 2.7 کیلومتر بر ساعت راه برود و در نسخه 2011، با سرعت 7 کیلومتر بر ساعت بدود، با فازهای پرواز (زمانی که هر دو پا از زمین جدا هستند) به مدت 80 میلیثانیه. ربات ASIMO قادر به بالا و پایین رفتن از پلهها، چرخیدن روان و حتی دویدن در مسیر دایرهای با شعاع 2.5 متر است. این قابلیتها از طریق فناوریهای پیشرفته کنترل گام (gait control) و تولید حرکت در زمان واقعی (real-time motion generation) ممکن شدهاند. ASIMO همچنین میتواند در سطوح ناهموار حرکت کند و بهطور خودکار مسیر خود را برای اجتناب از موانع تنظیم کند.
تعادل و پایداری در حرکات
تعادل ربات آسیمو از طریق فناوری کنترل پایداری پوسچر (posture stability control) تأمین میشود که شامل کنترل نیروی واکنش زمین (ground reaction force control)، مدل ZMP (Zero Moment Point) و کنترل موقعیت فرود پا (foot landing position control) است. این سیستمها به ASIMO اجازه میدهند حتی در شرایط غیرمنتظره، مانند سطوح ناهموار یا شیبدار، تعادل خود را حفظ کند. حسگرهای ششمحوری در پاها و حسگرهای ژیروسکوپی در تنه، اطلاعات بلادرنگ از وضعیت ربات را فراهم میکنند. برای مثال، ASIMO میتواند در حین دویدن، مرکز ثقل خود را به سمت داخل خم کند تا نیروی گریز از مرکز را خنثی کند، مشابه حرکات یک اسکیباز.
کنترل با فرمان صوتی
ASIMO مجهز به سیستم تشخیص صوت پیشرفتهای است که به آن امکان میدهد دستورات صوتی ساده را درک کرده و به آنها پاسخ دهد. این سیستم از فناوریهای پردازش زبان طبیعی (natural language processing) استفاده میکند و میتواند در محیطهای شلوغ و پر سر و صدا، صداها را فیلتر کند. در نسخه 2011، ASIMO قادر به تشخیص صدای افراد خاص و پاسخ به آنها بهصورت شخصیسازیشده بود. برای مثال، میتوانست به دستوراتی مانند «دنبال من بیا» یا «یک لیوان آب بیاور» واکنش نشان دهد. این قابلیت، همراه با توانایی خواندن کارتهای ارتباطی مادون قرمز (IC cards)، ASIMO را به یک دستیار بالقوه در محیطهای عمومی مانند دفاتر تبدیل کرد.
سنسورها و سیستم بینایی
ASIMO از مجموعهای از حسگرها برای درک محیط خود استفاده میکند. دو دوربین در سر آن بهعنوان حسگرهای بصری عمل میکنند و امکان تشخیص موانع و اشیاء را فراهم میکنند. حسگرهای اولتراسونیک در جلو و عقب تنه، فاصله تا موانع را اندازهگیری میکنند. حسگرهای لیزری و مادون قرمز در پایین تنه برای شناسایی سطح زمین و نشانههای روی کف استفاده میشوند، که به ناوبری دقیق کمک میکنند. این حسگرها با نقشههای از پیش بارگذاریشده ترکیب میشوند تا ASIMO بتواند موقعیت خود را در محیطهای پیچیده تعیین کند. سیستم بینایی ربات ASIMO همچنین از الگوریتمهای پردازش تصویر برای شناسایی اشیاء، ژستها و حرکات انسانها استفاده میکند.

قابلیت تشخیص چهره در ربات ASIMO
یکی از ویژگیهای برجسته ربات ASIMO، توانایی تشخیص چهره و شناسایی افراد است. در نسخه 2011، این ربات میتوانست چهرهها را در محیطهای شلوغ تشخیص داده و با استفاده از پایگاه داده داخلی، افراد را شناسایی کند. این قابلیت با ترکیب حسگرهای بصری و فناوریهای تشخیص تصویر (image recognition) امکانپذیر شده بود. ربات آسیمو میتوانست به افرادی که شناسایی کرده بود، به نامشان خوشامد بگوید یا جهتگیری خاصی را دنبال کند. این ویژگی برای کاربردهای خدماتی، مانند پذیرش در موزهها یا دفاتر، طراحی شده بود و نشاندهنده پیشرفت هوندا در تعامل انسان-ربات بود.
تعامل اجتماعی با انسانها
ربات آسیمو برای تعامل طبیعی با انسانها طراحی شده بود. این ربات میتوانست ژستها، حرکات و حالات بدن را تشخیص دهد و به آنها پاسخ دهد، مانند دست دادن یا اشاره به یک جهت خاص. در نمایشهای عمومی، ASIMO توانایی خود را در رقصیدن، سرو نوشیدنی و حتی هدایت ارکستر (مانند ارکستر سمفونیک دیترویت در سال 2008) نشان داد. قابلیتهای چندوظیفهای آن، مانند کار با چندین ASIMO دیگر برای انجام وظایف مشترک، تعامل اجتماعی آن را تقویت کرد. این ربات همچنین در برنامههای آموزشی، مانند بازدید از مدارس و نمایشگاههای علمی، برای الهامبخشی به کودکان در زمینه STEM (علوم، فناوری، مهندسی و ریاضی) استفاده شد.
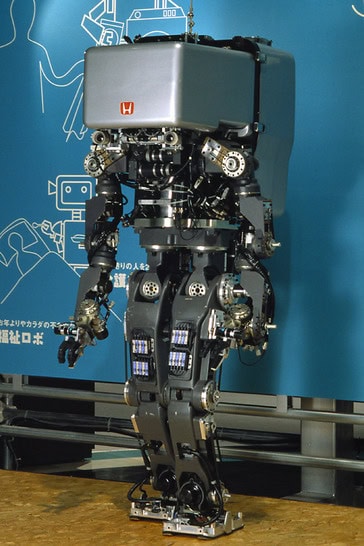
سیستم عامل و پردازش داده
ربات ASIMO از یک پردازنده سهبعدی اختصاصی هوندا استفاده میکرد که شامل سه لایه (پردازشگر، مبدل سیگنال و حافظه) بود و در ناحیه کمر ربات قرار داشت. این پردازنده امکان پردازش بلادرنگ دادههای حسگرها و اجرای الگوریتمهای پیچیده برای حرکت و تصمیمگیری را فراهم میکرد. سیستم عامل ASIMO بهصورت بالا به پایین (top-down) طراحی شده بود، به این معنا که تمام رفتارها و واکنشها توسط برنامهنویسان از پیش تعیین میشدند. کنترل ربات از طریق کامپیوتر، کنترلر بیسیم یا دستورات صوتی امکانپذیر بود. این سیستم، اگرچه پیشرفته بود، در مقایسه با رویکردهای مدرنتر پایین به بالا (bottom-up) که یادگیری خودکار را امکانپذیر میکنند، محدودتر بود.
هوش مصنوعی و یادگیری ماشینی ربات ASIMO
هوش مصنوعی ASIMO بر پایه الگوریتمهای از پیش برنامهریزیشده بود و فاقد قابلیتهای یادگیری ماشین پیشرفتهای بود که در رباتهای مدرنتر دیده میشود. این ربات از فناوریهای تشخیص محیط (environmental recognition) و تصمیمگیری خودکار (autonomous behavior generation) برای واکنش به تغییرات محیطی استفاده میکرد. برای مثال، ASIMO میتوانست با استفاده از ورودیهای حسگرهای چندگانه (بصری، شنیداری و لمسی)، محیط اطراف را ارزیابی کرده و رفتار مناسب را انتخاب کند. با این حال، عدم توانایی در یادگیری از تجربه یا حل مسائل غیرمنتظره، ربات آسیمو را در مقایسه با رباتهای امروزی مانند Spot از Boston Dynamics محدود میکرد.
جایگاه ASIMO در صنعت رباتیک
ربات آسیمو بهعنوان یکی از پیشگامان رباتیک انساننما، تأثیر عمیقی بر صنعت گذاشت. این ربات استانداردهای جدیدی برای حرکت دوپا، تعادل و تعامل انسان-ربات تعیین کرد و الهامبخش پروژههایی مانند Hubo در کره جنوبی شد. فناوریهای ASIMO در محصولات دیگر هوندا، مانند دستگاههای کمکحرکتی (walking assist devices) و اگزواسکلتها، به کار گرفته شدند. با این حال، توقف توسعه ASIMO در سال 2018 نشان داد که هوندا اولویت را به فناوریهای عملیتر، مانند رباتهای امدادی و آواتار، داده است. در مقایسه با رقبا مانند ربات اطلس یا ربات تسلا، ASIMO بیشتر یک پلتفرم نمایشی بود تا محصولی تجاری، اما میراث آن در پیشرفت رباتیک غیرقابل انکار است.
منبع: ابرار صنعتی