
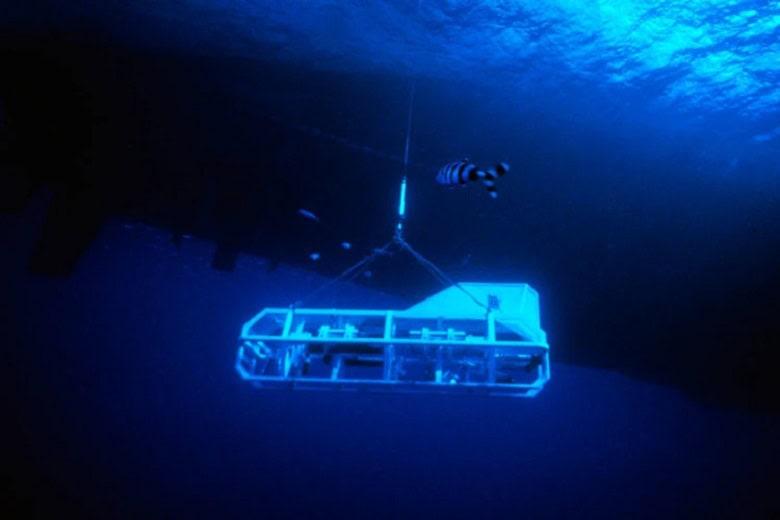
ربات زیرآبی آرگو که به عنوان یکی از پیشگامان فناوری کاوش دریایی شناخته میشود، یک وسیله غوطهور دوربیندار بدون سرنشین است که توسط آزمایشگاه غوطهوری عمیق مؤسسه اقیانوسشناسی وودز هول (WHOI) توسعه یافته است. این ربات، که در دهه ۱۹۸۰ ساخته شد، با قابلیت غوطهوری تا عمق ۶۰۰۰ متر، نقش کلیدی در کشف لاشه کشتی تایتانیک در سال ۱۹۸۵ ایفا کرد و بعدها در یافتن ناو جنگی بیسمارک در ۱۹۸۹ به کار رفت. آرگو، با وزن حدود ۱۸۰۰ کیلوگرم و ابعاد ۴.۶ متر طول، ۱.۱ متر عرض و ۱.۱ متر ارتفاع، از دوربینهای ویدئویی و سونارهای جانبی برای تصویربرداری و نقشهبرداری کف اقیانوس استفاده میکند.
این ربات، که به صورت کششی (towed) از کشتی مادر کنترل میشود، ۹۸ درصد کف اقیانوس را قابل دسترسی کرد و در مأموریتهای علمی، اکتشافی و نظامی کاربرد داشت. آرگو نه تنها کاوشگر بود، بلکه ابزاری برای جمعآوری نمونهها و تصویربرداری زنده به شمار میرفت و میراث آن در رباتهای مدرن ROV (وسیله غوطهور از راه دور) دیده میشود.

مشخصات ربات زیرآبی آرگو (Argo ROV)
- نوع ربات: ربات کنترلشونده از راه دور (ROV)
- سال معرفی: ۱۹۸۵
- توسعهدهنده: مؤسسه Woods Hole Oceanographic Institution (WHOI)
- کاربرد اصلی: اکتشاف اعماق اقیانوس، باستانشناسی دریایی، بررسی بستر دریا
- حداکثر عمق عملیاتی: حدود ۶۰۰۰ متر
- سیستم ناوبری: کابل متصل به کشتی مادر برای دریافت انرژی و فرمان
- تجهیزات: دوربینهای با کیفیت بالا، چراغهای پرقدرت، ابزار نمونهبرداری
- ماموریتهای شاخص: کشف لاشه کشتی تایتانیک در سال ۱۹۸۵
ربات زیرآبی آرگو (Argo ROV) چیست؟
ربات زیرآبی آرگو (Argo ROV)، که به معنای “آرگو” نامیده میشود، یک وسیله غوطهور دوربیندار بدون سرنشین (towed camera sled) است که توسط دکتر رابرت بالارد در آزمایشگاه غوطهوری عمیق WHOI توسعه یافته است. این ربات، که در اصل برای کاوشهای عمیق اقیانوس طراحی شد، با کابلهای فیبر نوری ۳۰۰ متری به کشتی مادر متصل میشود و از دوربینهای ویدئویی، سونارهای جانبی و چراغهای قدرتمند برای تصویربرداری کف اقیانوس استفاده میکند. آرگو با وزن ۱۸۰۰ کیلوگرم در هوا و ابعاد ۴.۶ متر طول، ۱.۱ متر عرض و ۱.۱ متر ارتفاع، تا عمق ۶۰۰۰ متر غوطهور میشود و ۹۸ درصد کف اقیانوس را پوشش میدهد.

آرگو، که در ۱۹۸۵ برای کشف تایتانیک به کار رفت، یک ROV کششی است و نه کاملاً مستقل، و با سرعت ۲ گره دریایی (حدود ۳.۷ کیلومتر بر ساعت) حرکت میکند. این ربات، که از مواد مقاوم به فشار مانند فولاد و آلومینیوم ساخته شده، برای مأموریتهای ۲۴ ساعته طراحی شد و دادههای زنده به سطح ارسال میکند. آرگو، که نامش از کشتی اساطیری آرگو الهام گرفته، نمادی از پیشرفت کاوش دریایی است و در کشف بیسمارک نیز نقش داشت.
مأموریتهای علمی و اکتشافی آرگو
مأموریتهای علمی و اکتشافی آرگو شامل کاوشهای عمیق اقیانوس برای نقشهبرداری کف دریا، جمعآوری نمونههای زیستی و بررسی کشتیهای غرقشده است. آرگو در مأموریتهای WHOI برای مطالعه اکوسیستمهای عمیق، مانند هیدروترمال ونتها، استفاده شد و دادههای ویدئویی و سونار برای مدلهای سهبعدی کف اقیانوس فراهم کرد. در اکتشاف، آرگو در جستجوی زیردریاییهای گمشده نیروی دریایی آمریکا، مانند USS Thresher و USS Scorpion در ۱۹۸۴ و ۱۹۸۵، نقش کلیدی ایفا کرد.
این ربات، که ۲۴ ساعته کار میکند، در مأموریتهای علمی برای ردیابی جریانهای عمیق و مواد معدنی به کار رفت و نمونههای راک و بیولوژیکی جمعآوری کرد. مأموریتهای آرگو، از ۱۹۸۰ تا ۱۹۹۰، بیش از ۱۰۰ کاوش را شامل شد و دادههای آن به درک بهتر ۹۸ درصد کف اقیانوس کمک کرد. آرگو، با قابلیتهای تصویربرداری، اکتشافات را از حد انسانی فراتر برد و پایهای برای ROVهای مدرن شد.

نقش Argo ROV در کشف کشتی تایتانیک
نقش آرگو ROV در کشف تایتانیک در ۱۹۸۵، که توسط رابرت بالارد هدایت شد، کلیدی بود. آرگو، که از کشتی تحقیقاتی آتلانتیس II کنترل میشد، با سونار جانبی و دوربینهای ویدئویی، کف اقیانوس را در عمق ۳۸۰۰ متری اسکن کرد و در ۱ سپتامبر ۱۹۸۵، بویلر تایتانیک را شناسایی نمود. این ربات، که ۲۴ ساعته کار میکرد، اولین تصاویر زنده از لاشه تایتانیک پس از ۷۳ سال را ارسال کرد و کشف را به جهان اعلام نمود.
آرگو با کشیدن ۶۰۰ متر کابل، میدان آوار را نقشهبرداری کرد و جزئیات مانند بدنه شکسته و کابینها را ثبت نمود. بدون آرگو، کاوش دستی با Alvin زمانبر میبود. نقش آرگو، نه تنها کشف را ممکن کرد، بلکه روشهای کاوش دریایی را تغییر داد و به مأموریتهای بعدی مانند بیسمارک در ۱۹۸۹ کمک نمود.
ویژگیهای طراحی و ساختار مهندسی
طراحی آرگو یک sled کششی فلزی با قاب آلومینیومی و فولادی است که برای عمق ۶۰۰۰ متری مقاوم به فشار ۶۰۰ بار ساخته شده. ساختار آن شامل چارچوب ۴.۶ متری با عرض و ارتفاع ۱.۱ متر، وزن ۱۸۰۰ کیلوگرم در هوا (۱۰۰۰ کیلوگرم در آب) و بالههای هیدرودینامیک برای پایداری در سرعت ۲ گره است. مهندسی آن بر پایه سادگی و دوام استوار است، با محفظههای ضدآب برای دوربینها و سونار.
ویژگیهای طراحی شامل لامپهای هالوژن ۱۰۰۰ واتی برای روشنایی، کابل فیبر نوری ۳۰۰ متری برای انتقال داده و سیستمهای شناوری برای کنترل عمق است. آرگو با چرخهای کوچک برای حرکت روی کف و سنسورهای دما و فشار تجهیز شده. این ساختار، آرگو را به ابزاری مقاوم و کارآمد برای کاوشهای طولانی تبدیل کرد و پایهای برای Jason ROV شد.
سیستمهای تصویربرداری و دوربینهای نصبشده روی Argo
سیستمهای تصویربرداری آرگو شامل دو دوربین ویدئویی رنگی با رزولوشن NTSC (۶۰ خط در اینچ) و سونارهای جانبی (side-scan sonar) با فرکانس ۱۰۳ کیلوهرتز برای نقشهبرداری کف است. دوربینهای اصلی، با لنزهای واید (زاویه ۹۰ درجه) و زوم، تصاویر زنده با نرخ ۳۰ فریم بر ثانیه ارسال میکنند و با لامپهای ۱۰۰۰ واتی، عمق تاریک را روشن مینمایند.
سونارهای جانبی، میدان ۵۰۰ متری را اسکن میکنند و تصاویر سایهای از اشیاء ایجاد مینمایند. سیستمها با کابل فیبر نوری، دادهها را بدون تأخیر به سطح منتقل میکنند. دوربینهای ثانویه برای نزدیکنمایی و سونارهای جلو برای اجتناب از موانع استفاده میشوند. این سیستمها، آرگو را به ابزاری بصری برای کشف تایتانیک تبدیل کردند.

عمق عملیاتی و قابلیتهای فنی ربات زیرآبی آرگو
عمق عملیاتی آرگو تا ۶۰۰۰ متر (۲۰ هزار فوت) است و در فشار ۶۰۰ بار کار میکند، که ۹۸ درصد کف اقیانوس را پوشش میدهد. قابلیتهای فنی شامل سرعت ۲ گره (۳.۷ کیلومتر بر ساعت)، برد ۵۰۰ متری سونار جانبی و انتقال داده ۱۰ مگابیت بر ثانیه با فیبر نوری است. آرگو با ۲۴ ساعت کار مداوم، کاوشهای گسترده را ممکن میسازد.
قابلیتهای دیگر شامل شناوری متغیر برای عمق ۱۰ متری و سنسورهای دما، شوری و جریان است. آرگو در تایتانیک، ۳۸۰۰ متری را کاوش کرد و در بیسمارک، ۴۵۰۰ متری. این قابلیتها، آرگو را به ابزاری همهکاره برای اقیانوسشناسی تبدیل کردند.
تجهیزات ناوبری و سنسورهای مورد استفاده
تجهیزات ناوبری ربات زیرآبی آرگو شامل سونارهای جانبی برای نقشهبرداری، سنسورهای USBL (Ultra-Short Baseline) برای موقعیتیابی و ژایروسکوپها برای جهتیابی است. سنسورهای دما، شوری و عمق، دادههای محیطی را ثبت میکنند و کابل فیبر نوری، موقعیت را با GPS کشتی مادر همگام میسازد.
سونارهای جلو (forward-looking) برای اجتناب از موانع و سنسورهای فشار برای عمق دقیق استفاده میشوند. این تجهیزات، آرگو را در تاریکی کامل هدایت میکنند و دقت موقعیت را به ۵ متر میرسانند. در تایتانیک، سونارها میدان آوار را نقشهبرداری کردند.
نحوه کنترل و هدایت ربات زیرآبی آرگو
نحوه کنترل آرگو از کشتی مادر با جویاستیک و مانیتورهای زنده انجام میشود، که کابل فیبر نوری ۳۰۰ متری دادهها و دستورات را منتقل میکند. هدایت با موتورهای الکتریکی کوچک برای تنظیم عمق و جهت، و شناوری با وزنههای قابل تنظیم است. اپراتورها با تصاویر ویدئویی و سونار، آرگو را به جلو میکشانند و سرعت ۲ گره را حفظ میکنند.
در مأموریتها، تیم سهنفره (اپراتور، ناظر و مهندس) از اتاق کنترل کشتی هدایت میکنند. آرگو با سیستمهای خودکار برای ثابت ماندن در عمق، هدایت را آسان میسازد. این نحوه، کاوش ۲۴ ساعته را ممکن کرد.
کاربردها در اقیانوسشناسی
کاربردهای ربات آرگو در اقیانوسشناسی شامل نقشهبرداری کف دریا، مطالعه هیدروترمال ونتها و جمعآوری نمونههای زیستی است. آرگو با سونار جانبی، مدلهای سهبعدی از کوههای زیرآبی ایجاد میکند و با دوربینها، اکوسیستمهای عمیق را ثبت مینماید. در مأموریتهای WHOI، آرگو جریانهای عمیق و مواد معدنی را پایش کرد.
کاربردهای دیگر، کاوش زیردریاییهای گمشده و بررسی آلودگیهای عمیق است. آرگو، با ۲۴ ساعت کار، دادههای مداوم برای مدلهای آب و هوایی فراهم میکند و پایهای برای ROVهای مدرن شد.
بررسی کشفیات بزرگ انجامشده توسط Argo
کشفیات بزرگ ربات زیرآبی آرگو شامل لاشه تایتانیک در ۱۹۸۵ (عمق ۳۸۰۰ متر، با تصاویر بویلر و بدنه شکسته) و بیسمارک در ۱۹۸۹ (عمق ۴۷۰۰ متر، با جزئیات توپها و بدنه) است. آرگو در ۱۹۸۴، USS Scorpion (عمق ۳۰۰۰ متر) را نقشهبرداری کرد و در ۱۹۸۵، USS Thresher را بررسی نمود. این کشفیات، روشهای کاوش را تغییر دادند.
در مأموریتهای علمی، آرگو هیدروترمال ونتها را در ۱۹۸۰ کاوش کرد و نمونههای باکتریایی جمعآوری نمود. کشفیات آرگو، بیش از ۱۰۰ مأموریت را شامل شد و دانش اقیانوس را غنی کرد.
مشکلات و چالشهای بهرهبرداری از Argo ROV
مشکلات بهرهبرداری آرگو شامل محدودیت کابل ۳۰۰ متری (که برد را به ۳۰۰ متر محدود میکند) و حساسیت به جریانهای قوی است. وزن ۱۸۰۰ کیلوگرمی در هوا، کشش کابل را چالشبرانگیز میکند و در عمق، فشار ۶۰۰ بار، نشت را تهدید مینماید. چالشهای دیگر، انتقال داده در آب شور (نویز فیبر نوری) و نگهداری لامپهای ۱۰۰۰ واتی است.
در تایتانیک، جریانهای عمیق هدایت را سخت کرد. چالشها با تستهای منظم حل شد، اما آرگو برای مأموریتهای طولانی، نیاز به Jason داشت.
هزینهها و منابع مالی پروژه Argo ROV
هزینههای پروژه ربات زیرآبی آرگو حدود ۵ میلیون دلار در دهه ۱۹۸۰ تخمین زده میشود، که عمدتاً از بودجه نیروی دریایی آمریکا (برای زیردریاییها) و WHOI تأمین شد. توسعه از ۱۹۸۰ با ۲ میلیون دلار برای ساخت و ۳ میلیون برای تستها بود. منابع مالی از قراردادهای ناسا و نیروی دریایی (برای Scorpion و Thresher) آمد و بالارد با بودجه خصوصی، تایتانیک را کاوش کرد.
هزینه نگهداری ربات آرگو سالانه ۵۰۰ هزار دلار بود، که شامل تعمیر کابل و سنسورها میشد. منابع مالی، آرگو را به ابزاری مقرونبهصرفه برای کاوشهای عمیق تبدیل کرد و میراث آن در ROVهای مدرن ادامه دارد.
سوالات متداول درباره ربات آرگو
ربات آرگو چه تفاوتی با زیردریاییهای سرنشیندار دارد؟
آرگو یک ربات بدون سرنشین است که از راه دور توسط کشتی مادر کنترل میشود. این ویژگی باعث میشود خطرات ناشی از اعماق زیاد و فشار بالا برای انسانها حذف شود و عملیات ایمنتر انجام گیرد.
چرا آرگو برای کشف تایتانیک انتخاب شد؟
زیرا توانایی رسیدن به اعماق بسیار زیاد (بیش از ۳۵۰۰ متر) را داشت و میتوانست با دوربینهای پیشرفته و کابل ارتباطی تصاویر زنده از اعماق ارسال کند.
مزیت اصلی استفاده از ROVهایی مثل آرگو چیست؟
هزینه کمتر نسبت به زیردریاییهای سرنشیندار، ایمنی بالاتر و توانایی انجام مأموریتهای طولانیمدت بدون محدودیتهای انسانی.
آیا ربات آرگو هنوز هم استفاده میشود؟
خیر، امروزه مدلهای جدیدتر و پیشرفتهتر با فناوری لیدار جایگزین آرگو شدهاند، اما میراث آن همچنان در تحقیقات اعماق دریا ادامه دارد.



