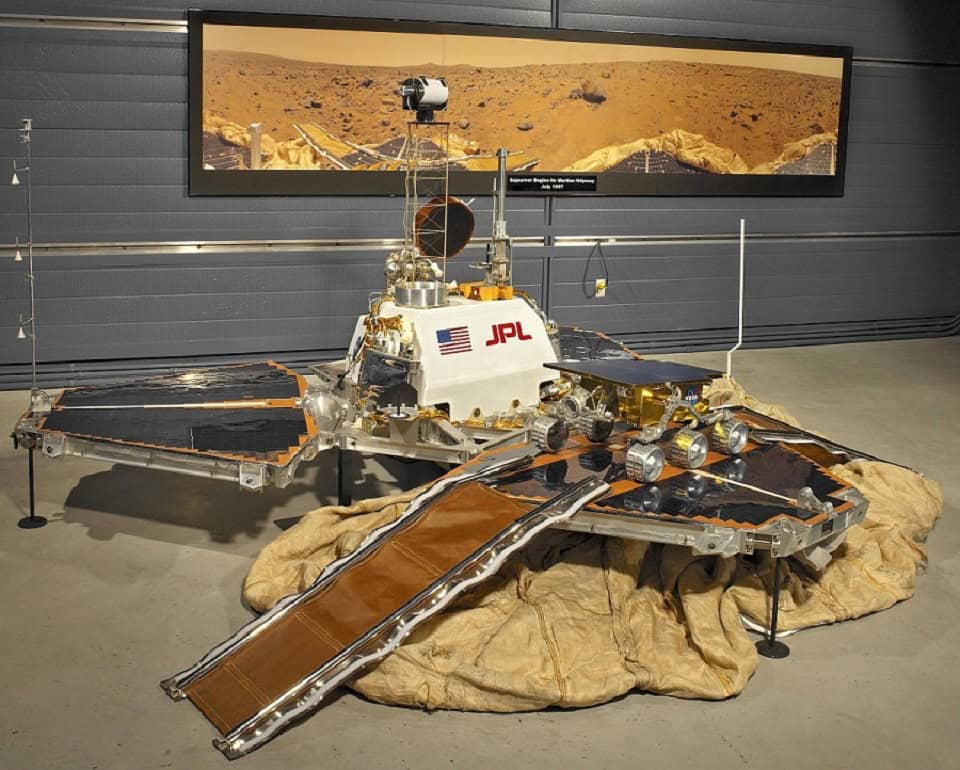
کاوشگر سوجورنر، بخشی از پروژه مریخ پثفایندر سازمان ناسا، اولین وسیله نقلیه چرخدار بود که روی سطح سیارهای غیر از زمین یا ماه حرکت کرد. این کاوشگر کوچک، که در سال ۱۹۹۷ به مریخ رسید، با هدف آزمایش فناوریهای جدید برای کاوش سیاره سرخ طراحی شده بود. سوجورنر با وزن تنها ۱۰.۶ کیلوگرم و ابعادی شبیه به یک اجاق مایکروویو (۶۵ سانتیمتر طول، ۴۸ سانتیمتر عرض، و ۳۰ سانتیمتر ارتفاع)، مجهز به ابزارهای علمی سادهای بود تا سنگها و خاک مریخ را بررسی کند. مأموریت اصلی آن، حرکت روی سطح ناهموار مریخ، جمعآوری دادههای شیمیایی از سنگها و خاک، و آزمایش سیستمهای ارتباطی و حرکتی در محیط خشن مریخ بود. این کاوشگر در منطقهای به نام دره آرس (Ares Vallis) فرود آمد، جایی که به دلیل وجود سنگهای متنوع ناشی از سیلهای باستانی، برای مطالعه تاریخ زمینشناختی مریخ بسیار مناسب بود.
کاوشگر سوجورنر قرار بود تنها ۷ روز مریخی (سول) کار کند، اما به طرز شگفتانگیزی ۸۳ سول (حدود ۸۵ روز زمینی) فعال ماند و دادههای ارزشمندی فرستاد. این کاوشگر از ایستگاه پایه (لندر) پثفایندر برای ارتباط با زمین استفاده میکرد و با سرعت حداکثر ۱ سانتیمتر در ثانیه حرکت میکرد. توانایی آن در عبور از موانع تا ارتفاع ۲۰ سانتیمتر، به لطف سیستم تعلیق نوآورانهاش بود. این مأموریت، که بخشی از برنامه «سریعتر، بهتر، ارزانتر» ناسا بود، با بودجهای حدود ۲۸۰ میلیون دلار اجرا شد، بسیار کمتر از مأموریتهای قبلی مانند وایکینگ. موفقیت سوجورنر راه را برای کاوشگرهای پیشرفتهتر مثل اسپریت و آپورچونیتی هموار کرد. کاوشگر سوجورنر بیش از ۵۵۰ تصویر از سطح مریخ گرفت و ۱۶ تحلیل شیمیایی از سنگها و خاک انجام داد.
معرفی مأموریت سوجورنر
مأموریت سوجورنر، که به طور رسمی «آزمایش پرواز میکروکاوشگر» (Microrover Flight Experiment) نام داشت، بخشی از برنامه اکتشافی ناسا به نام دیسکاوری بود. برنامه دیسکاوری بر مأموریتهای کمهزینه و سریع تمرکز داشت. کاوشگر سوجورنر در ۴ دسامبر ۱۹۹۶ با موشک دلتا II از پایگاه کیپ کاناورال پرتاب شد و در ۴ ژوئیه ۱۹۹۷ روی مریخ فرود آمد. هدف اصلی این کاوشگر، آزمایش توانایی حرکت خودکار در سطح ناهموار مریخ و جمعآوری دادههای علمی محدود بود.
این کاوشگر با پردازندهای ساده (Intel 80C85 با فرکانس ۲ مگاهرتز) و حافظه ۵۱۲ کیلوبایتی کار میکرد. سیستم کنترل آن به گونهای طراحی شده بود که در صورت قطع ارتباط با لندر، به طور خودکار به موقعیت قبلی خود بازگردد. این ویژگی، که به «نبض حیاتی» (heartbeat) معروف بود، ایمنی کاوشگر را در محیط ناشناخته مریخ تضمین میکرد. سوجورنر هرگز بیش از ۱۲ متر از لندر دور نشد، به دلیل محدودیت برد ارتباطی رادیوی UHF. با این حال، تصاویر و دادههای ارسالیاش، اولین نگاههای نزدیک به سطح مریخ را ارائه داد و به دانشمندان کمک کرد تا درباره گذشته سیاره سرخ اطلاعات بیشتری کسب کنند.
موفقیت سوجورنر به عنوان اولین کاوشگر چرخدار مریخ، نشان داد که وسایل نقلیه کوچک و ارزان میتوانند دادههای علمی ارزشمندی جمعآوری کنند. این مأموریت همچنین فناوری کیسههای هوای فرود را آزمایش کرد که بعداً در مأموریتهای دیگر مثل مریخ اکتشاف روورها (MER) استفاده شد.
حقایق کلیدی درباره کاوشگر سوجورنر
- نخستین مریخنورد موفق بود که در سال ۱۹۹۶ پرتاب و در ۴ ژوئیه ۱۹۹۷ بر سطح مریخ فرود آمد.
- وزن آن تنها ۱۰.۶ کیلوگرم بود و اندازهای در حد یک مایکروویو خانگی داشت.
- در مجموع حدود ۱۰۰ متر بر روی سطح مریخ حرکت کرد.
- انرژی خود را از پنل خورشیدی و باتریهای قابل شارژ دریافت میکرد.
- به مدت ۸۳ روز مریخی (سول) فعال بود، در حالیکه تنها برای ۷ روز طراحی شده بود.

پروژه مریخ پثفایندر
پروژه مریخ پثفایندر در سال ۱۹۹۲ به عنوان بخشی از برنامه دیسکاوری ناسا کلید خورد. این برنامه بر مأموریتهای کمهزینه و با زمان توسعه کوتاه تمرکز داشت. پثفایندر، که ابتدا با نام بررسی محیطی مریخ (MESUR) شناخته میشد، برای آزمایش فناوریهای جدید مثل سیستمهای فرود و کاوش رباتیک طراحی شد. بودجه کل پروژه حدود ۲۸۰ میلیون دلار بود، شامل ۱۵۰ میلیون برای لندر و ۲۵ میلیون برای سوجورنر، که در مقایسه با مأموریتهای قبلی بسیار مقرونبهصرفه بود.
توسعه پروژه تنها سه سال طول کشید، در حالی که مأموریتهای قبلی مثل وایکینگ بیش از شش سال زمان برده بودند. آزمایشگاه پیشرانش جت (JPL) ناسا مدیریت پروژه را بر عهده داشت و چالشهای اصلی شامل طراحی سیستم ورود، نزول و فرود (EDL) و ادغام کاوشگر خودمختار بود. پرتاب در دسامبر ۱۹۹۶ انجام شد و پس از سفری هفتماهه، پثفایندر در دره آرس فرود آمد.
این پروژه اولین مأموریت موفق فرود روی مریخ پس از وایکینگها در دهه ۱۹۷۰ بود. پثفایندر ۲.۳ گیگابیت داده، شامل ۱۶۵۰۰ تصویر از لندر و ۵۵۰ تصویر از سوجورنر، ارسال کرد. فناوریهایی مثل کیسههای هوای فرود و سیستم تعلیق راک-باگی که در این مأموریت آزمایش شدند، بعداً در کاوشگرهای دیگر استفاده شدند و استانداردی برای مأموریتهای مریخ شدند.
انتخاب نام سوجورنر و معنای آن
نام سوجورنر از طریق یک مسابقه بینالمللی که در مارس ۱۹۹۴ توسط جامعه سیارهای و JPL برگزار شد، انتخاب شد. این مسابقه برای دانشآموزان زیر ۱۸ سال بود و بیش از ۳۵۰۰ مقاله دریافت کرد. برنده، والری آمبرواز، دختری ۱۲ ساله از کنتیکت، نام سوجورنر تروث (Sojourner Truth) را پیشنهاد داد. سوجورنر تروث یک فعال حقوق مدنی و ضد بردهداری در قرن نوزدهم آمریکا بود که نامش به معنای «مسافر موقت» یا «جهانگرد» بود. این نام با ماهیت کاوشگر، که سفری کوتاه در مریخ داشت، کاملاً همخوانی داشت.
کلمه «سوجورنر» در زبان انگلیسی به کسی اشاره دارد که برای مدت کوتاهی در جایی اقامت میکند، و این مفهوم با مأموریت کوتاهمدت کاوشگر هماهنگ بود. این اولین بار بود که ناسا نام یک شخصیت واقعی را برای کاوشگر مریخ انتخاب کرد، و این تصمیم به مأموریت جنبهای الهامبخش و انسانی داد. نفرات دوم و سوم مسابقه به ترتیب نامهای ماری کوری و جودیت رسنیک (فضانورد) را پیشنهاد داده بودند. این مسابقه نه تنها نامی مناسب برای کاوشگر انتخاب کرد، بلکه توجه عمومی و بهویژه نسل جوان را به کاوش فضایی جلب کرد.
طراحی و ساخت کاوشگر سوجورنر
طراحی سوجورنر توسط تیمی در JPL انجام شد و بر سادگی، سبکی و مقاومت در برابر شرایط سخت مریخ تمرکز داشت. این کاوشگر ششچرخ با سیستم تعلیق راک-باگی طراحی شد که بدون نیاز به فنر، امکان عبور از موانع تا ۲۰ سانتیمتر را فراهم میکرد. بدنه کاوشگر از فایبرگلاس و آلومینیوم ساخته شده بود و با مادهای به نام آئروژل عایقبندی شد تا در برابر دماهای پایین مریخ (تا منفی ۸۰ درجه سانتیگراد) مقاوم باشد.
ساخت سوجورنر در کمتر از سه سال انجام شد و شامل آزمایشهای گسترده در محیط شبیهسازیشده مریخ (Mars Yard) در JPL بود. کاوشگر در حالت پرتاب ۱۸ سانتیمتر ارتفاع داشت و با کابلهای فولادی به لندر متصل بود که پس از فرود با مواد منفجره جدا میشدند. طراحی مدولار آن امکان ادغام سریع ابزارهای علمی را فراهم کرد و هزینه ساخت را به ۲۵ میلیون دلار محدود کرد، که در مقایسه با مأموریتهای قبلی بسیار کم بود.
ویژگیهای مهندسی بدنه سوجورنر
بدنه سوجورنر، که به نام جعبه الکترونیکی گرم (WEB) شناخته میشد، از فایبرگلاس با اسکلت آلومینیومی ساخته شده بود. این بدنه با آئروژل، مادهای بسیار سبک با چگالی ۲۰ میلیگرم بر سانتیمتر مکعب، عایقبندی شده بود تا از تجهیزات الکترونیکی در برابر سرما و تشعشعات مریخ محافظت کند. ارتفاع بدنه ۲۸ سانتیمتر و فاصله آن از سطح زمین ۱۳ سانتیمتر بود، که تعادل و پایداری را در زمین ناهموار مریخ تضمین میکرد.
ویژگیهای مهندسی شامل محفظهای مقاوم در برابر تشعشعات و سیستم گرمایی برای حفظ دمای داخلی بود. این طراحی، وزن کل کاوشگر را به ۱۰.۶ کیلوگرم رساند و امکان حمل ابزارهای علمی را فراهم کرد. بدنه سبک و مقاوم سوجورنر، الگویی برای کاوشگرهای بعدی شد و نشان داد که طراحیهای ساده میتوانند در محیطهای سخت سیارهای کارآمد باشند.
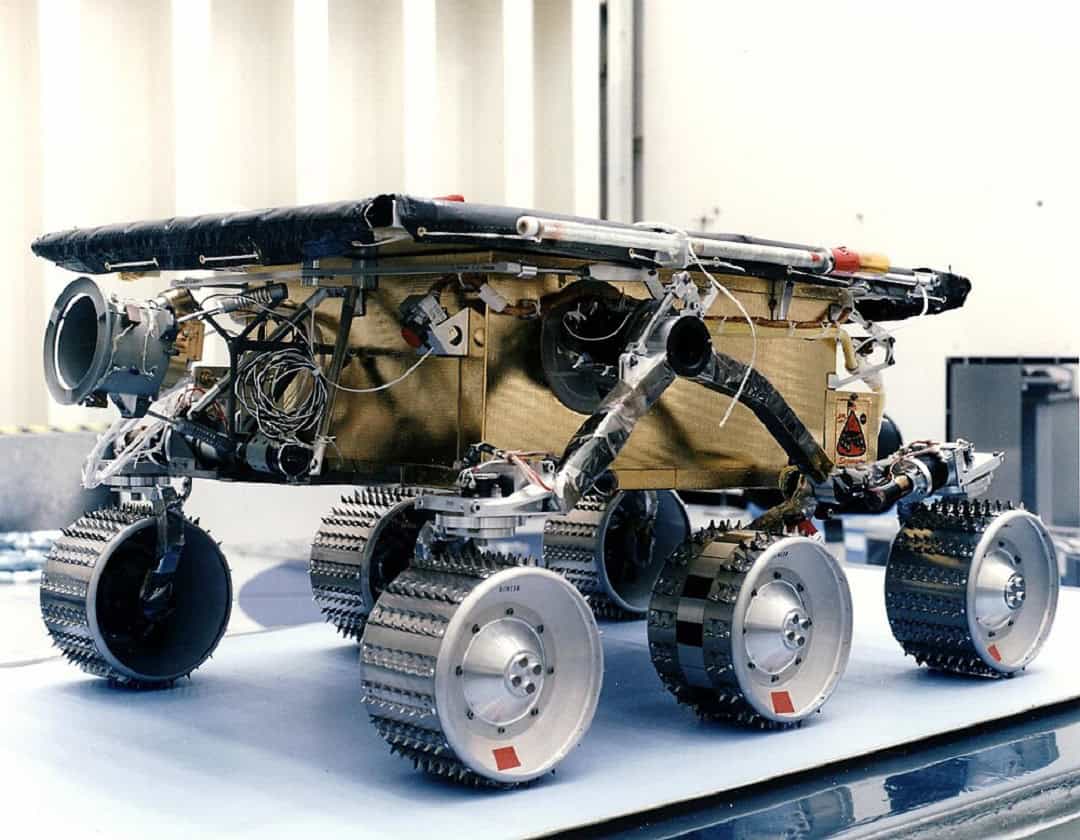
سیستم حرکتی و چرخها
سیستم حرکتی سوجورنر از طراحی راک-باگی استفاده میکرد که توسط دان بیکلر در JPL توسعه یافته بود. این سیستم ششچرخ بدون فنر، امکان عبور از موانع تا ارتفاع ۸ سانتیمتر و حرکت در شیبهای ۴۵ درجه را فراهم میکرد. چرخها از آلومینیوم ساخته شده بودند و زائدههای فلزی (cleat) برای افزایش چسبندگی در خاک سست مریخ داشتند.
این طراحی، ثبات کاوشگر را در زمینهای ناهموار تضمین میکرد و به آن اجازه میداد با سرعت حداکثر ۱ سانتیمتر در ثانیه حرکت کند. برد حرکتی سوجورنر به دلیل محدودیت ارتباطی، به ۵۰۰ متر محدود بود، اما این سیستم بعداً در کاوشگرهای بزرگتر مثل کیوریاسیتی و پرسیویرنس استفاده شد و به استانداردی در طراحی روورها تبدیل شد.
منبع انرژی خورشیدی سوجورنر
سوجورنر از پنلهای خورشیدی با مساحت ۰.۲ متر مربع برای تأمین انرژی استفاده میکرد که در ظهر مریخ تا ۱۶ وات برق تولید میکردند. برای عملیات در شب یا شرایط کمنور، کاوشگر به باتریهای لیتیوم-تیونیلی کلراید غیرقابل شارژ با ظرفیت ۱۵۰ وات-ساعت مجهز بود. سیستم مدیریت قدرت، انرژی را به صورت کارآمد بین ابزارها و موتورها توزیع میکرد. این طراحی، سوجورنر را قادر میساخت تا در نور ضعیف مریخ، که تنها ۶۰ درصد نور خورشید زمین را دریافت میکند، به کار ادامه دهد. با این حال، پس از تخلیه باتریها، عملیات کاوشگر به ساعات روز محدود شد، که یکی از عوامل پایان مأموریت بود.
ابزارها و تجهیزات علمی نصبشده
کاوشگر سوجورنر مجهز به ابزارهای علمی محدودی بود که شامل طیفسنج آلفا-پروتون-اشعه ایکس (APXS) و سه دوربین (دو دوربین تکرنگ در جلو و یک دوربین رنگی در عقب) بود. ابزار APXS برای تحلیل شیمیایی سنگها و خاک استفاده میشد و با تاباندن ذرات آلفا و اشعه ایکس، ترکیب عناصر را شناسایی میکرد. دوربینها برای نقشهبرداری سطح و ثبت تصاویر دقیق استفاده میشدند، و لیزرهای کوچک برای تشخیص موانع به کار میرفتند.
چرخهای کاوشگر نیز به عنوان ابزاری علمی عمل میکردند و با آزمایش سایش خاک، اطلاعاتی درباره خواص مکانیکی سطح مریخ ارائه میدادند. این ابزارها در مجموع ۱۶ تحلیل شیمیایی انجام دادند و دادههایی درباره سنگهای بازالتی و خاک مغناطیسی مریخ جمعآوری کردند.
مأموریت اصلی سوجورنر بر سطح مریخ
مأموریت اصلی سوجورنر، کاوش منطقه دره آرس و تحلیل شیمیایی سنگها و خاک بود. این کاوشگر در طول فعالیتش ۱۰۴ متر جابجا شد و ۹ سنگ را با نامهایی مثل «سنگ صدفسنگی» (Barnacle Bill) و «یوگی» (Yogi) بررسی کرد. این سنگها شواهدی از سیلهای باستانی ارائه کردند که نشاندهنده وجود آب مایع در گذشته مریخ بود.
سوجورنر دادههایی درباره ترکیب شیمیایی و خواص مکانیکی خاک جمعآوری کرد که به دانشمندان کمک کرد تا درباره تاریخ زمینشناختی مریخ اطلاعات بیشتری کسب کنند. تمرکز این مأموریت بر آزمایش فناوریهای جدید بود، اما دادههای علمی آن نیز ارزشمند بودند.
چالشهای فرود مریخ پثفایندر
فرود پثفایندر یکی از پیچیدهترین بخشهای مأموریت بود. کاوشگر با سرعت ۶.۱ کیلومتر در ثانیه وارد جو نازک مریخ شد. سیستم ورود، نزول و فرود (EDL) شامل سپر حرارتی، چتر نجات، و کیسههای هوای پرشده با گاز بود که کاوشگر را از ضربه محافظت میکرد. پس از فرود، کیسههای هوا ۱۵ بار روی سطح پریدند که خطر واژگونی را افزایش داد.
بیضی فرود ۲۰۰ در ۱۰۰ کیلومتر بود و اطلاعات کمی درباره سطح دره آرس در دسترس بود، که برنامهریزی را دشوار میکرد. با این حال، سیستم کیسههای هوا موفقیتآمیز بود و بعداً در مأموریتهای دیگر استفاده شد.

نخستین تصاویر ارسالشده توسط سوجورنر
اولین تصاویر سوجورنر در روز اول مریخی (سول ۱) گرفته شد و رمپ لندر را نشان داد. دوربینهای تکرنگ جلو، برای نقشهبرداری سطح استفاده شدند، در حالی که دوربین رنگی عقب، مناظر پانورامایی را ثبت کرد. این کاوشگر در مجموع بیش از ۵۵۰ تصویر ارسال کرد، از جمله تصاویری از سنگهایی مثل «سنگ صدفسنگی» که به دلیل ظاهر خاصش نامگذاری شده بود. این تصاویر، اولین نگاههای نزدیک به سطح مریخ را ارائه کردند و توجه جهانی را جلب کردند.
بررسی خاک و سنگهای مریخ توسط سوجورنر
سوجورنر با ابزار APXS، سنگهایی مثل «سنگ صدفسنگی» و «یوگی» را تحلیل کرد و نشان داد که این سنگها حاوی سیلیس بالا و ترکیبات بازالتی هستند. خاک مریخ نیز مغناطیسی بود و حاوی مادهای به نام مگمیت، که نشانهای از فرسایش آبی در گذشته بود. این کاوشگر ۱۶ تحلیل شیمیایی انجام داد که وجود آب مایع در تاریخ مریخ را تأیید کرد و به دانشمندان کمک کرد تا درباره گذشته سیاره سرخ اطلاعات بیشتری کسب کنند.
فناوریهای نوآورانه در کنترل از راه دور
کنترل کاوشگر سوجورنر از زمین با تأخیر ۱۰ تا ۱۵ دقیقهای به دلیل فاصله مریخ انجام میشد. تیم JPL از نرمافزارهای پیشرفته و عینکهای سهبعدی برای برنامهریزی مسیرها استفاده کرد. سیستم خودمختاری کاوشگر، با استفاده از لیزرهای تشخیص موانع، مسیرهای ایمن را انتخاب میکرد. ویژگی «نبض حیاتی» نیز در صورت قطع ارتباط، کاوشگر را به موقعیت قبلی بازمیگرداند. این فناوریها پایهای برای کنترل روورهای بعدی شدند.
دستاوردهای علمی مأموریت سوجورنر
کاوشگر سوجورنر شواهدی از وجود آب مایع در گذشته مریخ ارائه کرد، از جمله سنگهای با سیلیس بالا و خاک مغناطیسی. این کاوشگر ۲.۳ گیگابیت داده، شامل ۱۶۵۰۰ تصویر از لندر و ۵۵۰ تصویر از خود، ارسال کرد. دادههای آن به درک بهتر تاریخ زمینشناختی مریخ کمک کرد و فناوریهای آزمایششدهاش، مثل سیستم تعلیق راک-باگی، در مأموریتهای بعدی استفاده شدند.
- ترکیب سنگهای مریخی را با استفاده از دستگاه طیفسنج آلفا پروتون ایکس بررسی کرد.
- با حرکت و ایجاد رد چرخها، ویژگیهای مکانیکی خاک مریخ را تحلیل نمود.
- بیش از ۵۵۰ تصویر از سطح مریخ ثبت و ارسال کرد.
- ثابت کرد که امکان اکتشاف سیار و رباتیک در سیارهای دیگر وجود دارد.
طول عمر مأموریت و پایان فعالیت سوجورنر
سوجورنر برای ۷ سول طراحی شده بود، اما ۸۳ سول (۸۵ روز زمینی) فعال ماند. ارتباط در ۲۷ سپتامبر ۱۹۹۷ به احتمال زیاد به دلیل تخلیه باتریها قطع شد. مأموریت به طور رسمی در ۱۰ مارس ۱۹۹۸ پایان یافت، اما میراث آن در کاوشگرهای بعدی ادامه یافت.